геометрия
Брахистохрона под землей
Мотивация
В сборниках задач по физике часто встречается известная задача о продолжительности свободного падения тела сквозь прямой тоннель, проходящий через центр Земли и соединяющий диаметрально противоположные точки. Для решения нужно знать, что сила притяжения к центру Земли в таком тоннеле уменьшается линейно до нуля, и тело, упавшее в такой тоннель, будет совершать гармонические колебания. Время движения составляет половину периода и для модели однородной Земли равно 42 минуты. Более того, это время не меняется для любого прямого тоннеля, идущего по хорде (не проходящего через центр), если трением можно пренебречь.
Также в
Вполне естественным кажется желание скрестить эти две задачи и выяснить, какой формы нужно проложить тоннель под землей, чтобы в идеальной ситуации без трения между точками A и B на поверхности (скажем, между двумя городами) поезд проезжал за наименьшее время. Эта новая задача имеет аналитическое решение. Её ответом является гипоциклоида — кривая, которую описывают точки окружности радиуса $$a$$, катящейся без проскальзывания внутри другой окружности радиуса $$b$$. Вот как записывается параметрическое уравнение гипоциклоиды и выглядит ее чертеж:
$$\begin{cases} x=(b-a)\cos\theta+a\cos\dfrac{b-a}{a}\theta,\\ y=(b-a)\sin\theta-a\sin\dfrac{b-a}{a}\theta. \end{cases}$$
$$\begin{tikzpicture} \definecolor{cyan}{RGB}{0, 190, 230} \def\clr{black} \def\a{1} \def\b{5} \newcommand{\xt}[1]{(\b-\a)*cos(#1)+\a*cos((\b-\a)*#1/\a} \newcommand{\yt}[1]{(\b-\a)*sin(#1)-\a*sin((\b-\a)*#1/\a} \draw[cyan,very thin] (-\b-1,-\b-1) grid (\b+1,\b+1); \draw[->] (-\b-1,0) -- (\b+1,0); \draw[->] (0,-\b-1) -- (0,\b+1); \draw[\clr,thick] (0,0) circle (\b); \draw[\clr,dashed,very thin] (0,0) circle (\b-\a); \draw[line width=2pt,orange!80!red] plot[samples=60,domain=0:\a*360,smooth,variable=\t] ({\xt{\t}},{\yt{\t}}); \def\t0{40} \draw[\clr!50!black] (\t0:\b-\a) circle (\a); \draw[purple,fill] ({\xt{\t0}},{\yt{\t0}}) circle (2pt) -- (\t0:\b-\a) circle (1pt) node [midway, sloped, above] {\scriptsize $a$} -- (0,0) circle (1pt) node [midway, sloped, above] {\scriptsize $b-a$} node [below right] {$O$}; \node[\clr,fill=white,text width=1cm,align=center] at (-\b,\b) {$a=\a$ $b=\b$}; \end{tikzpicture}$$
Для наглядности анимируем чертеж:
$$\dvisvgm \usetikzlibrary{animations} \definecolor{cyan}{RGB}{0, 190, 230} \begin{tikzpicture} \def\a{1} \def\b{5} \useasboundingbox (-\b-1.05,-\b-1.05) rectangle (\b+1.05,\b+1.05); \newcommand{\xt}[1]{(\b-\a)*cos(#1)+\a*cos((\b-\a)*#1/\a} \newcommand{\yt}[1]{(\b-\a)*sin(#1)-\a*sin((\b-\a)*#1/\a} \draw[cyan,very thin] (-\b-1,-\b-1) grid (\b+1,\b+1); \draw[\clr,thick] (0,0) circle (\b) node [purple,below right] {$O$}; \draw[\clr,dashed,very thin] (0,0) circle (\b-\a); \draw[line width=1.5pt,orange!80!red] plot[samples=60,domain=0:\a*360,smooth,variable=\t] ({\xt{\t}},{\yt{\t}}); \begin{scope}:rotate = {0s="0", (5*\b)s="360",repeats} [aanimate={orbit={4}{\b}}] \draw[\clr!50!black] (0:\b-\a) circle (\a); \draw[purple,fill] (0:\b-\a) circle (1pt) -- (0,0) circle (1pt) node [midway, sloped, above] {\scriptsize $b-a$} ; \begin{scope} :rotate = {0s="0", (5*\a)s="-360", origin={(\b-\a,0)}, repeats} \draw [purple,fill] (0:\b-\a) circle (1pt) -- (0:\b) circle (1pt) node [midway, sloped, above] {\scriptsize $a$} ; \end{scope} \end{scope} \node[\clr,fill=white,text width=1cm,align=center] at (-\b,\b) {$a=\a$ $b=\b$}; \end{tikzpicture}$$
Я задумался об этой задаче в старших классах или на первом курсе института, но тогда, разумеется, у меня не хватало знаний для решения в аналитическом виде. Я вернулся к задаче на четвертом курсе и смог довести вычисления до конца, не обращаясь к источникам, но и не без помощи Maple. Эти вычисления были одними из самых сложных среди всех задач с явным аналитическим ответом, которые я решал.
Физическая сторона задачи
$$\begin{tikzpicture} \def\a{1} \def\b{5} \draw ([shift=(-10:\b)]0) arc (-10:90:\b); \draw[-stealth] (\b,0) node[right]{$A$} -- node[pos=0.92,above,inner sep=2] {$\varphi$} (0,0) -- (\b*0.35,\b*0.6) node[below,pos=0.9]{$\vec{r}$} ; \node[above] at (\b*0.32,\b*0.95) {$B$}; \draw[line width=1pt,orange!80!red] plot[samples=12,domain=0:72,smooth,variable=\t] ({(\b-\a)*cos(\t)+\a*cos((\b-\a)*\t/\a},{(\b-\a)*sin(\t)-\a*sin((\b-\a)*\t/\a}); \end{tikzpicture}$$
Движение поезда по подземному тоннелю будем рассматривать в полярных координатах. Считаем потенциал внутри Земли осцилляторным: $$U\sim r^2$$. Запишем закон сохранения энергии с учетом нулевой скорости поезда на поверхности:
$${mv^2\over 2}+{m\omega^2r^2\over 2}={m\omega^2r_0^2\over 2},$$(1)
где $$r_0$$ — радиус Земли, $$\omega=2\pi/T$$ — круговая частота колебаний, соответствующая периоду в 84 минуты. Время движения через тоннель $$\inline t=\int{dl\over v}$$. Выражаем скорость $$\inline v=\omega\sqrt{r_0^2-r^2}$$ из (1) и для времени движения поезда через тоннель получаем следующее выражение:
$$t=\int{dl\over v}={1\over\omega}\int{\sqrt{dr^2+r^2d\varphi^2}\over\sqrt{r_0^2-r^2}}={1\over\omega}\int{\sqrt{r'^2+r^2}\over\sqrt{r_0^2-r^2}}d\varphi,$$
Здесь мы выразили элемент длины пути через полярные координаты. Таким образом, задача свелась к поиску функции $$r(\varphi)$$ с фиксированным значением $$r(\varphi_A)=r(\varphi_B)=r_0$$ на концах отрезка, для которой функционал
$$\omega t=\int\limits_{\varphi_A}^{\varphi_B}\sqrt{{r'^2+r^2}\over{r_0^2-r^2}}d\varphi$$(2)
принимает наименьшее значение.
Математическая сторона задачи
Задача по минимизации интеграла (2) на множестве достаточно хороших с точки зрения физика функций (скажем, дифференцируемых сколько нужно раз) — типовая задача вариационного исчисления. Заметим, что подынтегральное выражение в (2) можно представить в виде функциональной зависимости от $$r$$ и ее производной:
$${\cal L}(r,r')=\sqrt{{r' ^2+r^2}\over{r_0^2-r^2}}$$(3)
Из курса дифференциальных уравнений известно, что экстремальные значения (2) нужно искать на решениях дифференциального уравнения Эйлера — Лагранжа:
$${\partial{\cal L}\over\partial r}-{d\over d\varphi}{\partial{\cal L}\over\partial r'}=0.$$
Если вы вооружитесь бумагой и ручкой и попробуете подставить сюда (3), то быстро заметите сложность получившегося дифференциального уравнения со второй производной и нагромождением корней и осознаете тупиковость этого подхода. В системах компьютерной алгебры есть встроенные пакеты для решения вариационных задач. Вот пример для Maple, где вы видите трехэтажное дифференциальное уравнение:
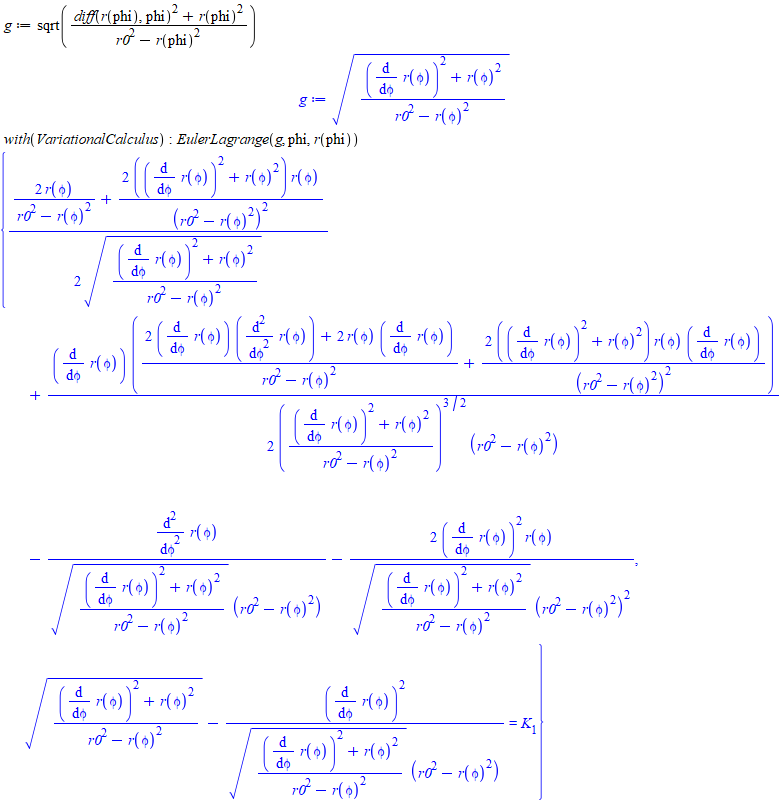
Кроме того, Maple заботливо подсказывает, что у получившегося дифференциального уравнения есть первый интеграл.
И тут вы вспоминаете, что на курсах теоретической механики и дифференциальных уравнений
$${\cal L}-r'{\partial{\cal L}\over\partial r'}=const.$$
Если вам проще воспринимать физику, а не математику, вы можете представить некоторую систему, описываемую функцией Лагранжа (3). Движение во «времени» $$\varphi$$ от «момента» $$\varphi_A$$ к $$\varphi_B$$ будет происходить по такой траектории $$r(\varphi)$$, на которой «действие» (2) примет экстремальное значение. Так как функция Лагранжа $$\cal L$$ не зависит от «времени» $$\varphi$$, то у системы есть сохраняющаяся величина — «энергия». Первый интеграл выше как раз и дает величину этой «энергии».
Выполним дифференцирование:
$$k={\cal L}-r'{\partial{\cal L}\over\partial r'}=\sqrt{{r' ^2+r^2}\over{r_0^2-r^2}} -r'{r'\over\sqrt{r_0^2-r^2}\sqrt{r'^2+r^2}}={r^2\over\sqrt{r_0^2-r^2}\sqrt{r'^2+r^2}}.$$
Мы пришли к дифференциальному уравнению первого порядка $$\inline r^2=k\sqrt{r'^2+r^2}\sqrt{r_0^2-r^2}$$, в котором разделяются переменные и получается следующий интеграл:
$$\varphi=\int{dr\over\sqrt{\cfrac{r^4}{k^2(r_0^2-r^2)}-r^2}}.$$
Его можно вычислить аналитически. Например, Maple выдает такой результат:

Чтобы доказать, что это выражение описывает гипоциклоиду, нужно взять её параметрическое уравнение и проделать достаточно громоздкие преобразования обратных тригонометрических функций, которые я не буду сейчас приводить.
В интернете опять кто-то неправ, или учимся избегать ошибок
Когда я занимался этой задачей, мне попадалась статья с нестандартными вычислениями: вместо полярных координат использовались декартовы. Тогда мне показалось, что автору очень повезло: уравнение гипоциклоиды в параметрической форме написано в таком виде, что параметр оказался пропорциональным физическому времени. При подготовке этой заметки я опять наткнулся на ту же статью. Сейчас эти нестандартные вычисления кажутся мне ошибочными.
Я предположил, что это
Вот ключевой момент статьи, в котором делается попытка доказать, что гипоциклоида — искомое решение:
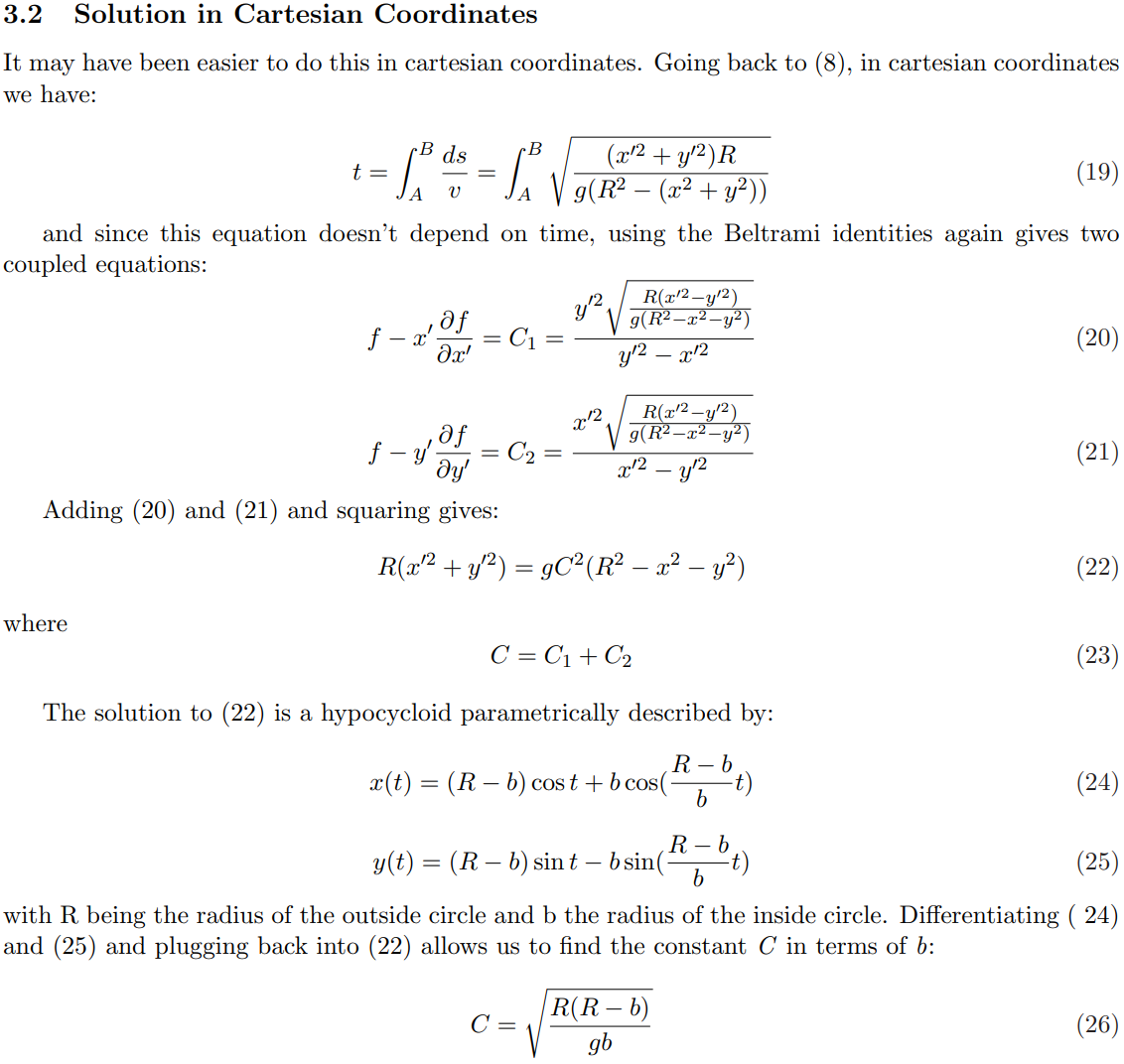
Вопросы начинаются с формулы (19), в которой пропущен дифференциал, и поэтому не совсем понятно, по какому параметру дальше берутся производные. Эти же производные сохраняются вплоть до (22), куда подставляются $$x(t)$$ и $$y(t)$$ из (24) и (25). Но параметр $$t$$ в (24) и (25) не может быть временем $$t_\text{физ}$$, так как он является аргументом тригонометрических функций и должен быть безразмерным. Получается, это некоторый параметр, задающий положение точки на траектории, но не являющийся временем.
(Попутно возникает
Еще возникает вопрос о степенях свободы. В уравнениях (19) и (22) неизвестные величины — $$(x, y, t)$$. Таким образом, эти уравнения содержат лишнюю степень свободы по сравнению с неизвестными $$(r, \varphi)$$ из нашего рассмотрения (и из предыдущего раздела работы Аманды). Эта избыточность мешает корректному применению формализма Лагранжа — Эйлера. Какие признаки этого мы видим?
-
(22) — не единственное возможное следствие из (20) и (21). Если поделить (20) на (21), получим, что $$(y'/x')^2=(dy/dx)^2=const$$, а это есть уравнение, описывающее не гипоциклоиду, а прямую траекторию. Почему это следствие из (20) и (21) менее правильное, чем (22)?
-
(22) с точностью до константы $$C$$ по форме совпадает с законом сохранения энергии, с которого начиналось решение. Действительно, выражение в левой части напоминает квадрат скорости, а в правой — разницу квадратичных потенциалов, то есть изменение потенциальной энергии. Присутствие константы $$C$$ объясняется тем, что производные в (22) берутся не по физическому времени $$t_\text{физ}$$, а по другому параметру $$t$$, который в $$C$$ раз меньше: $$t_\text{физ}=Ct$$. Если бы связь $$t_\text{физ}=Ct$$ нарушилась, то (22) противоречило бы закону сохранения энергии. Таким образом, (22) можно получить без применения лагранжева формализма, просто напрямую из закона сохранения энергии с помощью замены $$t_\text{физ}=Ct$$. Следовательно, (22) не может иметь большего физического содержания, чем закон сохранения энергии, и не несет информацию о траектории, минимизирующей время.
-
(24) и (25) формально являются решением (22), так как зануляют его при выполнении (26). Но они не являются единственным решением. Фактически, любое физически возможное движение
из-за сохранения энергии будет удовлетворять уравнению (22). Важно лишь выбрать параметризацию этого движения так, чтобы физическое время было пропорционально параметру. Возьмем для примера движение по хорде $$x(t)=A$$, $$y(t)=B\cos t$$, где $$\inline A^2+B^2=R^2$$, подставим в (22) и при должном выборе константы $$C$$ (то есть при выборе правильного движения во времени вдоль хорды) получим тождество:
$$RB^2\sin^2 t=gC^2(R^2-A^2-B^2\cos^2 t)=gC^2B^2\sin^2 t.$$
Таким образом, осцилляторное движение по тоннелю в виде прямой хорды также является решением (22). Но оно отнюдь не минимизирует функционал (19) для общего времени движения между двумя точками.
Я так и не смог понять, можно ли провести рассуждения в декартовых координатах с избыточной степенью свободы и получить правильный ответ. Понятно желание использовать декартовы координаты, а не полярные, так как в них уравнение гипоциклоиды выглядит проще. Но интуитивно кажется, что лишняя степень свободы, появившаяся в функционале времени и соответствующая выбору закона движения тела вдоль траектории, не дает при применении лагранжева формализма достаточных ограничений на траекторию.
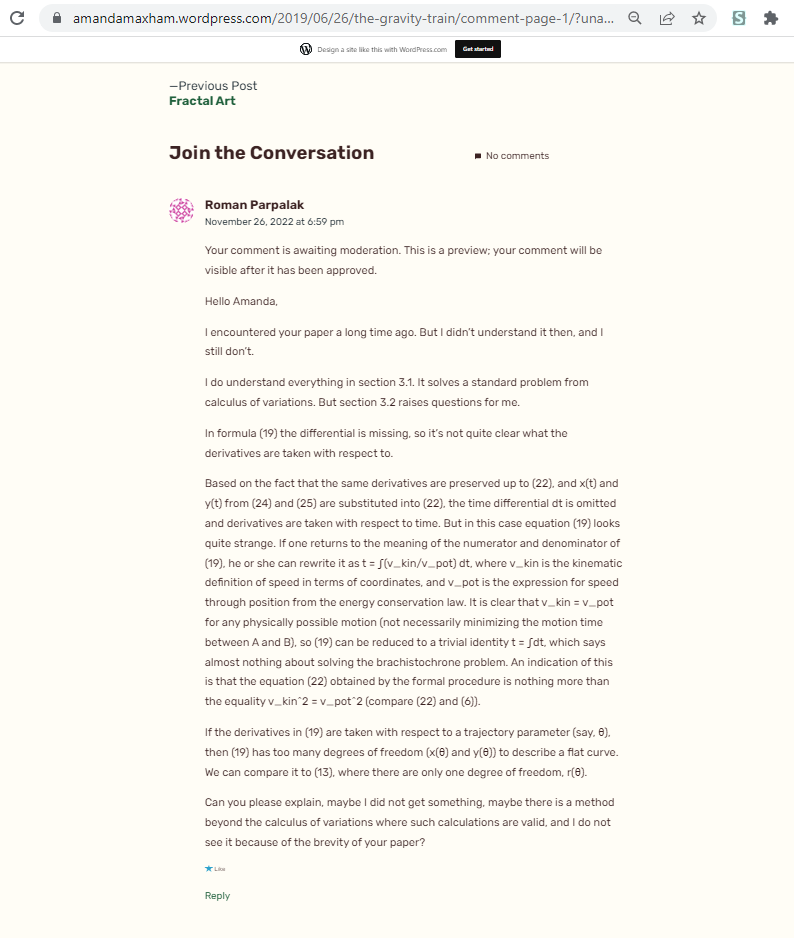
Я оставил комментарий в блоге Аманды с вопросами. Но никакой реакции не последовало.
{kind=link}
Напишите свой комментарий, если видите ошибку в моих рассуждениях, или если знаете, как сделать корректное рассмотрение в декартовых координатах.
Добавлено 13.10.2023: я нашел у себя в архиве файлов сохраненную в 2008 году статью о брахистохроне, и это не работа Аманды. Автор не указан, статья располагалась по этой ссылке. Ход решения в этих статьях одинаков, но видно, что написаны они
Метод наименьших квадратов во многомерном пространстве
Я собираюсь применить метод наименьших квадратов для проведения гиперплоскости через набор точек во многомерном пространстве. Для начала вспомним суть метода и поймем, в чем состоит задача.
В простейшем случае метод наименьших квадратов применяется для проведения прямой линии через набор экспериментальных точек и состоит в минимизации суммы квадратов отклонений $$\inline\sum(y_i-ax_i-b)^2$$, которые списываются на погрешность измерений. В результате минимизации для коэффициентов a и b получается простая система линейных уравнений. Здесь важно предположение о том, что ошибки по оси x пренебрежимо малы по сравнению с ошибками по оси y. Если это не так, то минимизировать нужно более сложное выражение.
Иногда возникает задача другого рода — провести геометрическую прямую через набор геометрических точек «наилучшим образом». Для этой задачи метод наименьших квадратов нужно адаптировать, так как поспешное применение формул для коэффициентов a и b будет давать разные прямые в разных системах координат. Теперь отклонения по осям должны давать одинаковый вклад. Правильный подход заключается в минимизации суммы квадратов расстояний $$\inline\sum(y_i-ax_i-b)^2/(1+a^2)$$ от точек (xi, yi) до проводимой прямой. Он дает нелинейную систему уравнений, которую можно решать численно. Однако этот подход тяжело обобщается на интересующий меня многомерный случай. Поэтому мы с самого начала будем рассматривать задачу во многомерном пространстве.
Задача
Пусть задан набор точек $$\vec{x}^k$$. Мы хотим провести гиперплоскость $$(\vec{n}\cdot\vec{x}) = d$$ такую, что сумма квадратов расстояний от точек $$\vec{x}^k$$ до нее будет минимальна. Расстояние до гиперплоскости находится с помощью проекции на единичный вектор нормали $$\vec{n}$$, и выражение для минимизации принимает вид
$$\sum_k\left((\vec{n}\cdot\vec{x}^k)-d\right)^2\to\text{min}.$$
При этом нужно учитывать уравнение связи $$(\vec{n}\cdot\vec{n}) = 1$$, которое уменьшает на 1 количество степеней свободы в неизвестных величинах ni, d. Учет связи выполняется с помощью метода множителей Лагранжа. Однако мы пойдем другим путем, который сократит выкладки и напрямую приведет к выражениям, подходящим для численного счета. Мы разрешим вектору $$\vec{n}$$ иметь произвольную длину, и введем явную нормировку:
$$\sum_k\left({(\vec{n}\cdot\vec{x}^k)\over|\vec{n}|}-d\right)^2\to\text{min}.$$
Параллельный перенос
Продифференцируем по d:
$$\sum_k\left({(\vec{n}\cdot\vec{x}^k)\over|\vec{n}|}-d\right)={(\vec{n}\cdot\sum_k\vec{x}^k)\over|\vec{n}|}-\sum_kd=0.$$
Как видим, «центр масс» набора точек $$\inline\sum\vec{x}^k/\sum 1$$ находится на искомой плоскости. Выполним параллельный перенос системы координат таким образом, чтобы ее начало совпало с центром набора точек $$\inline\sum\vec{x}^k=0$$. В этой системе координат d=0.
Условие на вектор нормали
Перейдем к индексным обозначениям и продифференцируем по na:
$${\partial\over\partial n_a}\left({n_ix_i^k\,n_jx_j^k\over n_ln_l}\right)={2x_a^k\,n_jx_j^k\over n_ln_l}-{2n_a\,n_ix_i^k\,n_jx_j^k\over n_ln_l\,n_pn_p}=0,$$
$$n_jx_j^k\left[x_a^k(n_pn_p)-n_a(n_ix_i^k)\right]=0,$$
$$\sum_k\vec{n}\cdot\vec{x}^k\left[\vec{x}^k(\vec{n}\cdot\vec{n})-\vec{n}(\vec{n}\cdot\vec{x}^k)\right]=0.$$
Вычислительный аспект
Нелинейное уравнение относительно вектора $$\vec{n}$$ можно решать методом итераций:
$$\sum_k\vec{n}_{i+1}\cdot\vec{x}^k\left[\vec{x}^k(\vec{n}_i\cdot\vec{n}_i)-\vec{n}_i(\vec{n}_i\cdot\vec{x}^k)\right]=0.$$
С помощью матрицы $$A_{aj}(\vec{n})=\left[x_a^k(n_pn_p)-n_a(n_ix_i^k)\right]x_j^k$$ оно представляется в виде
$$A(\vec{n}_i)\,\vec{n}_{i+1}=0$$
и сводится к поиску ядра линейного оператора. Нетривиальность ядра связана с «лишней» степенью свободы, появившейся
По теореме Фредгольма ядро оператора ортогонально образу сопряженного оператора, то есть линейной оболочке, натянутой на строки $$\vec{a}_a$$ матрицы $$A_{aj}(\vec{n}_i)$$. Алгоритм поиска ортогонального дополнения состоит в выборе произвольного вектора $$\vec{r}$$ и ортогонализации набора векторов $$\vec{r}, \vec{a}_a$$:
$$\vec{r}^{\,\prime}=\vec{r}-\vec{a}_1{(\vec{r}\cdot\vec{a}_1)\over(\vec{a}_1\cdot\vec{a}_1)},$$
$$\vec{a}_2^{\,\prime}=\vec{a}_2-\vec{a}_1{(\vec{a}_2\cdot\vec{a}_1)\over(\vec{a}_1\cdot\vec{a}_1)},\quad\vec{r}^{\,\prime\prime}=\vec{r}^{\,\prime}-\vec{a}_2^{\,\prime}{(\vec{r}^{\,\prime}\cdot\vec{a}_2^{\,\prime})\over(\vec{a}_2^{\,\prime}\cdot\vec{a}_2^{\,\prime})}\ldots$$
Так как строки матрицы $$A(\vec{n}_i)$$ линейно зависимы, один из векторов $$\vec{a}_a$$ при ортогонализации из набора исключается. Для большей определенности алгоритма в качестве начального приближения перебираем базисные векторы, пока в результате ортогонализации не получится ненулевой вектор следующего приближения $$\vec{n}_{i+1}$$. В двумерном и трехмерном случае процесс ортогонализации значительно упрощается. Например, в трехмерном случае нетривиальный элемент ядра найдется среди тройки векторов $$\vec{a}_1\times\vec{a}_2, \vec{a}_1\times\vec{a}_3, \vec{a}_2\times\vec{a}_3$$.
Как показывают практические вычисления, последовательные приближения $$\vec{n}_i$$ быстро сходятся к искомому вектору нормали.