механика
Брахистохрона и свободное падение зарядов в дополнительном магнитном поле
Вернемся к задаче о брахистохроне — кривой скорейшего спуска. Иоганн Бернулли доказал, что в однородном поле тяжести такой кривой является циклоида.
Есть еще одна задача на движение частиц, в которой ответом тоже является циклоида, — задача о падении заряда в однородном магнитном поле. Эта задача эквивалентна движению заряженной частицы в ортогональных однородных электрическом и магнитном поле с нулевой начальной скоростью. Ее можно решать переходом в движущуюся систему отсчета, в которой электрическое поле зануляется и частица движется по окружности в магнитном поле. Комбинация поступательного движения по прямой и вращательного движения по окружности и дает циклоиду.
$$ \begin{tikzpicture}[scale=0.52725,line width=0.2mm] \def\b{0.18} \draw[opacity=0] (-1.32,0.76) rectangle +(22.6,-5.52) \draw[->] (-0.52,0) -- (20.52,0) node[right] {\( x \)}; \draw[->] (0,0.52) -- (0,-4) node[below] {\( y \)}; \foreach \x in {1,3.12,...,20} { \foreach \y in {0.48,-0.92,...,-4} { \draw[blue, line width=0.14mm] (\x,\y) circle (0.24) +(-\b,\b) -- +(\b,-\b) +(\b,\b) -- +(-\b,-\b); } } \node[blue] at (-1,-3.5) {\(\vec{B}\)}; \draw[->,line width=0.4mm,red] (-0.98,0.5) -- +(0,-2) node[below] {\( \vec{E} \)}; \draw[thick,smooth,samples=100,domain=0:18.7] plot({\x-sin(deg(\x))},{cos(deg(\x))-1}); \foreach \x in {2,8.29,...,20} \draw[->,thick] ({\x-sin(deg(\x))}, {cos(deg(\x))-1}) -- ++(0.2, -0.1); \end{tikzpicture} $$
В прошлый раз мы занимались брахистохроной в
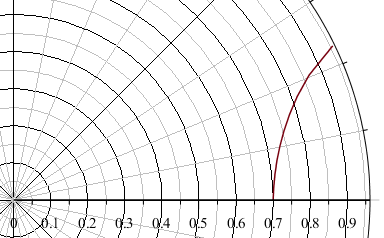
Из качественных соображений понятно, что траектория будет «звездообразной».
Численное решение уравнений движения показывает траекторию, очень напоминающую гипоциклоиду. Давайте разберемся, действительно ли заряд в магнитном поле и потенциале $$r^2$$ будет двигаться по гипоциклоиде и случайно ли траектория опять совпадает с брахистохроной?
Падение в «вертикальном» поле
Направим ось y вниз и будем рассматривать движение в поле с потенциальной энергией $$U(x,y,z)=-mf(y)$$, причем $$f(0)=0$$. Из закона сохранения энергии $$v^2=2f(y)$$. Брахистохрона минимизирует интеграл для времени движения:
$$t=\int {dl\over v}=\int {\sqrt{dx^2+dy^2\over 2f(y)}}={1\over\sqrt{2}}\int {\sqrt{y'^2+1\over f(y)}}\ dx.$$
Первый интеграл соответствующего уравнения Эйлера — Лагранжа имеет вид
$$\frac{1}{K_1^2} = (y'^2 + 1) f(y).$$(1)
Это дифференциальное уравнение для линейного потенциала $$f(y)=gy$$, то есть для однородного силового поля, описывает циклоиду.
Рассмотрим теперь свободное движение заряда в том же потенциале и горизонтальном магнитном поле (в этой системе координат оно направлено вдоль оси z). Выберем векторный потенциал в виде $$\vec{A}=(-yB,0,0)$$. Лагранжиан заряженной частицы в однородном магнитном поле
$${\cal L}={mv^2\over 2}-U+q\vec{v}\cdot\vec{A}=\frac{m}{2}\left(\dot{x}^2+\dot{y}^2\right)+mf(y)-qB\dot{x}.$$
Лагранжиан не зависит явно от времени и координаты x, поэтому энергия и обобщенный импульс сохраняются:
$$p_x = m \dot{x} - q B y,\quad E = \dfrac{m}{2}\left( \dot{x}^2 + \dot{y}^2 \right) - mf(y).$$
В начальном положении энергия и импульс равны нулю, поэтому:
$$\begin{cases} 0=m\dot{x}-qBy,\\ 0=\cfrac{1}{2}\left(\dot{x}^2 + \dot{y}^2\right)-f(y). \end{cases} \Leftrightarrow \begin{cases} \dot{x}&=\dfrac{qB}{m}y,\\ f(y)\!\!\!\!&=\cfrac{1}{2}\left(\dot{x}^2 + \dot{y}^2\right). \end{cases}$$
$$f(y)={1\over2}\dot{x}^2(y'^2+1)={q^2B^2\over 2m^2}y^2(y'^2+1).$$(2)
Полученное дифференциальное уравнение (2) траектории заряда в поле притяжения и магнитном поле совпадает с уравнением брахистохроны (1) только если $$f(y)\sim y$$. Таким образом, свободное движение в силовом и магнитном полях имеет ту же траекторию, что и брахистохрона в силовом поле, только если это однородное поле.
Падение в центральном поле
В прошлый раз мы находили уравнение брахистохроны в поле с потенциалом $$g(r)\sim r^2$$. Если проделать те же выкладки для произвольного потенциала, получим следующее дифференциальное уравнение:
$$k^2\left(r'^2+r^2\right)\left(g(r_0)-g(r)\right)=r^4.$$(3)
Перейдем теперь к свободному движению заряда в этом поле и дополнительном магнитном поле.
$$\usetikzlibrary{calc} \begin{tikzpicture}[scale=1.25] \foreach \x in {-2.3,-0.8,...,3} { \foreach \y in {-2.3,-0.8,...,3} { \draw[thick,blue] (\x,\y) node {\small\(\odot{}\)}; } } \draw[->] (0,0) -- (2.5,0) node[right] {$x$}; \draw[] (0,0) circle (2); \def\a{0.3} \def\b{2} \newcommand{\xt}[1]{(\b-\a)*cos(#1)+\a*cos((\b-\a)*#1/\a} \newcommand{\yt}[1]{(\b-\a)*sin(#1)-\a*sin((\b-\a)*#1/\a} \draw[thick,domain=0:110,smooth,variable=\t,samples=100] plot ({\xt{\t}},{\yt{\t}}); \def\t{25} \def\q{25.1} \coordinate (P) at ({\xt{\t}},{\yt{\t}}); \coordinate (P1) at ({\xt{\q}},{\yt{\q}}); \draw[->] (0,0) -- (P) node[midway,above] {$r$}; \draw[->] ($(P)!0!(P1)$) -- ($(P)!130!(P1)$) node[left] {$\vec{v}$}; \draw[->] (0.95,0) arc (0:22:0.95); \node at (1.1,0.2) {$\theta$}; \end{tikzpicture}$$
В силу наличия вращательной симметрии удобно выбрать векторный потенциал в форме $$\vec{A}=\vec{B}\times\vec{r}/2$$. Лагранжиан заряженной частицы
$${\cal L}={mv^2\over 2}-U+q\vec{v}\cdot\vec{A}= \frac{m}{2}\left(\dot{r}^2+r^2\dot{\varphi}^2\right)-mg(r)+{qB\over2}r^2\dot{\varphi}.$$
Первые интегралы для уравнения Эйлера — Лагранжа дают сохранение энергии и обобщенного момента импульса:
$$\begin{cases} \dfrac{2E}{m}\!\!\!\!&=r^2\dot{\varphi}^2+\dot{r}^2+2g(r),\\ L&=r^2(m\dot{\varphi}+\dfrac{1}{2}qB). \end{cases}$$
Так как в начальный момент $$r(0)=r_0$$, а скорость равна нулю, то:
$$\begin{cases} 2g(r_0)\!\!\!\!&=r^2\dot{\varphi}^2+\dot{r}^2+2g(r),\\ r_0^2\dfrac{1}{2}qB\!\!\!\!&=r^2(m\dot{\varphi}+\dfrac{1}{2}qB). \end{cases} \Leftrightarrow \begin{cases} 2g(r_0)-2g(r)\!\!\!\!&=\dot{\varphi}^2(r^2+r'^2),\\ \dot{\varphi}r^2&=(r_0^2-r^2)\dfrac{qB }{2m}. \end{cases}$$
$$2(g(r_0)-g(r))=(r^2+r'^2)\left({r_0^2\over r^2}-1\right)^2\dfrac{q^2B^2}{4m^2}.$$(4)
Перемножив (3) на (4), получаем
$$2k^2\left(g(r_0)-g(r)\right)^2=\left(r_0^2 - r^2\right)^2\dfrac{q^2B^2}{4m^2}.$$
Мы видим, что только при $$g(r)\sim r^2$$ уравнения (3) и (4) могут совпадать.
Совпадение брахистохроны и траектории падения заряженной частицы в дополнительном магнитном поле оказалось случайным. Оно имеет место только для однородного поля притяжения и для осцилляторного потенциала в
Брахистохрона под землей
Мотивация
В сборниках задач по физике часто встречается известная задача о продолжительности свободного падения тела сквозь прямой тоннель, проходящий через центр Земли и соединяющий диаметрально противоположные точки. Для решения нужно знать, что сила притяжения к центру Земли в таком тоннеле уменьшается линейно до нуля, и тело, упавшее в такой тоннель, будет совершать гармонические колебания. Время движения составляет половину периода и для модели однородной Земли равно 42 минуты. Более того, это время не меняется для любого прямого тоннеля, идущего по хорде (не проходящего через центр), если трением можно пренебречь.
Также в
Вполне естественным кажется желание скрестить эти две задачи и выяснить, какой формы нужно проложить тоннель под землей, чтобы в идеальной ситуации без трения между точками A и B на поверхности (скажем, между двумя городами) поезд проезжал за наименьшее время. Эта новая задача имеет аналитическое решение. Её ответом является гипоциклоида — кривая, которую описывают точки окружности радиуса $$a$$, катящейся без проскальзывания внутри другой окружности радиуса $$b$$. Вот как записывается параметрическое уравнение гипоциклоиды и выглядит ее чертеж:
$$\begin{cases} x=(b-a)\cos\theta+a\cos\dfrac{b-a}{a}\theta,\\ y=(b-a)\sin\theta-a\sin\dfrac{b-a}{a}\theta. \end{cases}$$
$$\begin{tikzpicture} \definecolor{cyan}{RGB}{0, 190, 230} \def\clr{black} \def\a{1} \def\b{5} \newcommand{\xt}[1]{(\b-\a)*cos(#1)+\a*cos((\b-\a)*#1/\a} \newcommand{\yt}[1]{(\b-\a)*sin(#1)-\a*sin((\b-\a)*#1/\a} \draw[cyan,very thin] (-\b-1,-\b-1) grid (\b+1,\b+1); \draw[->] (-\b-1,0) -- (\b+1,0); \draw[->] (0,-\b-1) -- (0,\b+1); \draw[\clr,thick] (0,0) circle (\b); \draw[\clr,dashed,very thin] (0,0) circle (\b-\a); \draw[line width=2pt,orange!80!red] plot[samples=60,domain=0:\a*360,smooth,variable=\t] ({\xt{\t}},{\yt{\t}}); \def\t0{40} \draw[\clr!50!black] (\t0:\b-\a) circle (\a); \draw[purple,fill] ({\xt{\t0}},{\yt{\t0}}) circle (2pt) -- (\t0:\b-\a) circle (1pt) node [midway, sloped, above] {\scriptsize $a$} -- (0,0) circle (1pt) node [midway, sloped, above] {\scriptsize $b-a$} node [below right] {$O$}; \node[\clr,fill=white,text width=1cm,align=center] at (-\b,\b) {$a=\a$ $b=\b$}; \end{tikzpicture}$$
Для наглядности анимируем чертеж:
$$\dvisvgm \usetikzlibrary{animations} \definecolor{cyan}{RGB}{0, 190, 230} \begin{tikzpicture} \def\a{1} \def\b{5} \useasboundingbox (-\b-1.05,-\b-1.05) rectangle (\b+1.05,\b+1.05); \newcommand{\xt}[1]{(\b-\a)*cos(#1)+\a*cos((\b-\a)*#1/\a} \newcommand{\yt}[1]{(\b-\a)*sin(#1)-\a*sin((\b-\a)*#1/\a} \draw[cyan,very thin] (-\b-1,-\b-1) grid (\b+1,\b+1); \draw[\clr,thick] (0,0) circle (\b) node [purple,below right] {$O$}; \draw[\clr,dashed,very thin] (0,0) circle (\b-\a); \draw[line width=1.5pt,orange!80!red] plot[samples=60,domain=0:\a*360,smooth,variable=\t] ({\xt{\t}},{\yt{\t}}); \begin{scope}:rotate = {0s="0", (5*\b)s="360",repeats} [aanimate={orbit={4}{\b}}] \draw[\clr!50!black] (0:\b-\a) circle (\a); \draw[purple,fill] (0:\b-\a) circle (1pt) -- (0,0) circle (1pt) node [midway, sloped, above] {\scriptsize $b-a$} ; \begin{scope} :rotate = {0s="0", (5*\a)s="-360", origin={(\b-\a,0)}, repeats} \draw [purple,fill] (0:\b-\a) circle (1pt) -- (0:\b) circle (1pt) node [midway, sloped, above] {\scriptsize $a$} ; \end{scope} \end{scope} \node[\clr,fill=white,text width=1cm,align=center] at (-\b,\b) {$a=\a$ $b=\b$}; \end{tikzpicture}$$
Я задумался об этой задаче в старших классах или на первом курсе института, но тогда, разумеется, у меня не хватало знаний для решения в аналитическом виде. Я вернулся к задаче на четвертом курсе и смог довести вычисления до конца, не обращаясь к источникам, но и не без помощи Maple. Эти вычисления были одними из самых сложных среди всех задач с явным аналитическим ответом, которые я решал.
Физическая сторона задачи
$$\begin{tikzpicture} \def\a{1} \def\b{5} \draw ([shift=(-10:\b)]0) arc (-10:90:\b); \draw[-stealth] (\b,0) node[right]{$A$} -- node[pos=0.92,above,inner sep=2] {$\varphi$} (0,0) -- (\b*0.35,\b*0.6) node[below,pos=0.9]{$\vec{r}$} ; \node[above] at (\b*0.32,\b*0.95) {$B$}; \draw[line width=1pt,orange!80!red] plot[samples=12,domain=0:72,smooth,variable=\t] ({(\b-\a)*cos(\t)+\a*cos((\b-\a)*\t/\a},{(\b-\a)*sin(\t)-\a*sin((\b-\a)*\t/\a}); \end{tikzpicture}$$
Движение поезда по подземному тоннелю будем рассматривать в полярных координатах. Считаем потенциал внутри Земли осцилляторным: $$U\sim r^2$$. Запишем закон сохранения энергии с учетом нулевой скорости поезда на поверхности:
$${mv^2\over 2}+{m\omega^2r^2\over 2}={m\omega^2r_0^2\over 2},$$(1)
где $$r_0$$ — радиус Земли, $$\omega=2\pi/T$$ — круговая частота колебаний, соответствующая периоду в 84 минуты. Время движения через тоннель $$\inline t=\int{dl\over v}$$. Выражаем скорость $$\inline v=\omega\sqrt{r_0^2-r^2}$$ из (1) и для времени движения поезда через тоннель получаем следующее выражение:
$$t=\int{dl\over v}={1\over\omega}\int{\sqrt{dr^2+r^2d\varphi^2}\over\sqrt{r_0^2-r^2}}={1\over\omega}\int{\sqrt{r'^2+r^2}\over\sqrt{r_0^2-r^2}}d\varphi,$$
Здесь мы выразили элемент длины пути через полярные координаты. Таким образом, задача свелась к поиску функции $$r(\varphi)$$ с фиксированным значением $$r(\varphi_A)=r(\varphi_B)=r_0$$ на концах отрезка, для которой функционал
$$\omega t=\int\limits_{\varphi_A}^{\varphi_B}\sqrt{{r'^2+r^2}\over{r_0^2-r^2}}d\varphi$$(2)
принимает наименьшее значение.
Математическая сторона задачи
Задача по минимизации интеграла (2) на множестве достаточно хороших с точки зрения физика функций (скажем, дифференцируемых сколько нужно раз) — типовая задача вариационного исчисления. Заметим, что подынтегральное выражение в (2) можно представить в виде функциональной зависимости от $$r$$ и ее производной:
$${\cal L}(r,r')=\sqrt{{r' ^2+r^2}\over{r_0^2-r^2}}$$(3)
Из курса дифференциальных уравнений известно, что экстремальные значения (2) нужно искать на решениях дифференциального уравнения Эйлера — Лагранжа:
$${\partial{\cal L}\over\partial r}-{d\over d\varphi}{\partial{\cal L}\over\partial r'}=0.$$
Если вы вооружитесь бумагой и ручкой и попробуете подставить сюда (3), то быстро заметите сложность получившегося дифференциального уравнения со второй производной и нагромождением корней и осознаете тупиковость этого подхода. В системах компьютерной алгебры есть встроенные пакеты для решения вариационных задач. Вот пример для Maple, где вы видите трехэтажное дифференциальное уравнение:
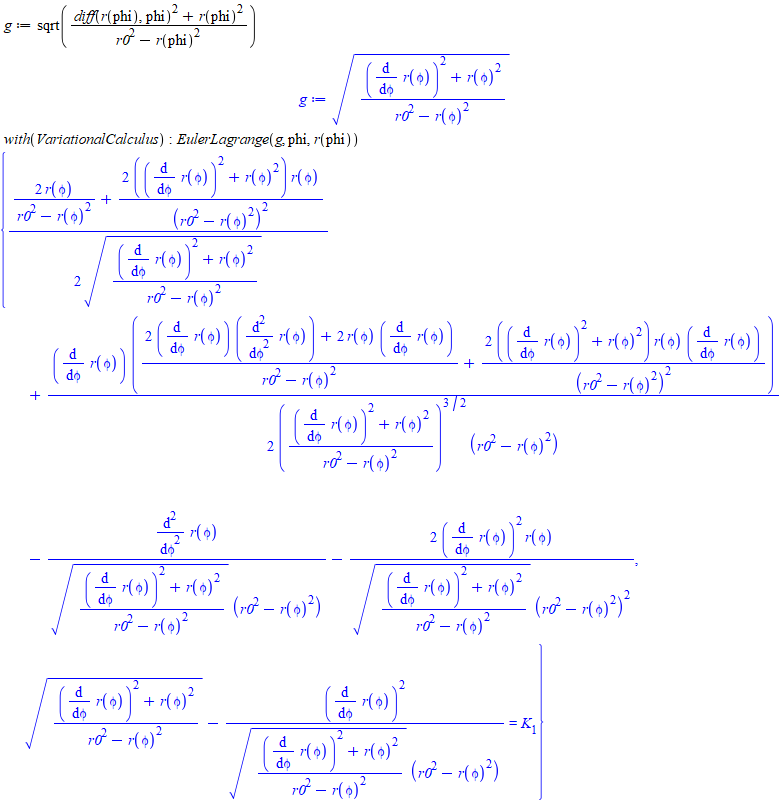
Кроме того, Maple заботливо подсказывает, что у получившегося дифференциального уравнения есть первый интеграл.
И тут вы вспоминаете, что на курсах теоретической механики и дифференциальных уравнений
$${\cal L}-r'{\partial{\cal L}\over\partial r'}=const.$$
Если вам проще воспринимать физику, а не математику, вы можете представить некоторую систему, описываемую функцией Лагранжа (3). Движение во «времени» $$\varphi$$ от «момента» $$\varphi_A$$ к $$\varphi_B$$ будет происходить по такой траектории $$r(\varphi)$$, на которой «действие» (2) примет экстремальное значение. Так как функция Лагранжа $$\cal L$$ не зависит от «времени» $$\varphi$$, то у системы есть сохраняющаяся величина — «энергия». Первый интеграл выше как раз и дает величину этой «энергии».
Выполним дифференцирование:
$$k={\cal L}-r'{\partial{\cal L}\over\partial r'}=\sqrt{{r' ^2+r^2}\over{r_0^2-r^2}} -r'{r'\over\sqrt{r_0^2-r^2}\sqrt{r'^2+r^2}}={r^2\over\sqrt{r_0^2-r^2}\sqrt{r'^2+r^2}}.$$
Мы пришли к дифференциальному уравнению первого порядка $$\inline r^2=k\sqrt{r'^2+r^2}\sqrt{r_0^2-r^2}$$, в котором разделяются переменные и получается следующий интеграл:
$$\varphi=\int{dr\over\sqrt{\cfrac{r^4}{k^2(r_0^2-r^2)}-r^2}}.$$
Его можно вычислить аналитически. Например, Maple выдает такой результат:

Чтобы доказать, что это выражение описывает гипоциклоиду, нужно взять её параметрическое уравнение и проделать достаточно громоздкие преобразования обратных тригонометрических функций, которые я не буду сейчас приводить.
В интернете опять кто-то неправ, или учимся избегать ошибок
Когда я занимался этой задачей, мне попадалась статья с нестандартными вычислениями: вместо полярных координат использовались декартовы. Тогда мне показалось, что автору очень повезло: уравнение гипоциклоиды в параметрической форме написано в таком виде, что параметр оказался пропорциональным физическому времени. При подготовке этой заметки я опять наткнулся на ту же статью. Сейчас эти нестандартные вычисления кажутся мне ошибочными.
Я предположил, что это
Вот ключевой момент статьи, в котором делается попытка доказать, что гипоциклоида — искомое решение:
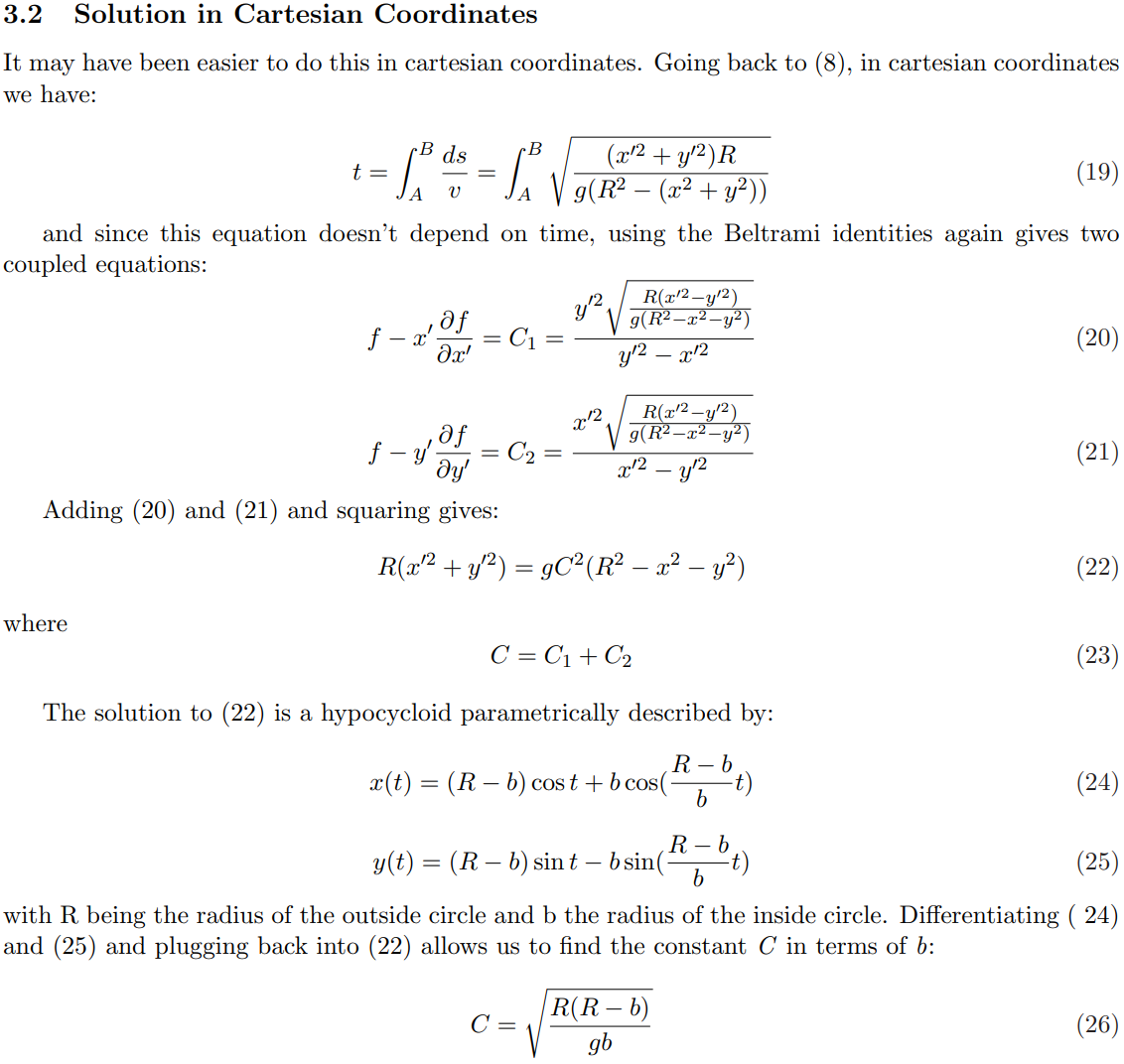
Вопросы начинаются с формулы (19), в которой пропущен дифференциал, и поэтому не совсем понятно, по какому параметру дальше берутся производные. Эти же производные сохраняются вплоть до (22), куда подставляются $$x(t)$$ и $$y(t)$$ из (24) и (25). Но параметр $$t$$ в (24) и (25) не может быть временем $$t_\text{физ}$$, так как он является аргументом тригонометрических функций и должен быть безразмерным. Получается, это некоторый параметр, задающий положение точки на траектории, но не являющийся временем.
(Попутно возникает
Еще возникает вопрос о степенях свободы. В уравнениях (19) и (22) неизвестные величины — $$(x, y, t)$$. Таким образом, эти уравнения содержат лишнюю степень свободы по сравнению с неизвестными $$(r, \varphi)$$ из нашего рассмотрения (и из предыдущего раздела работы Аманды). Эта избыточность мешает корректному применению формализма Лагранжа — Эйлера. Какие признаки этого мы видим?
-
(22) — не единственное возможное следствие из (20) и (21). Если поделить (20) на (21), получим, что $$(y'/x')^2=(dy/dx)^2=const$$, а это есть уравнение, описывающее не гипоциклоиду, а прямую траекторию. Почему это следствие из (20) и (21) менее правильное, чем (22)?
-
(22) с точностью до константы $$C$$ по форме совпадает с законом сохранения энергии, с которого начиналось решение. Действительно, выражение в левой части напоминает квадрат скорости, а в правой — разницу квадратичных потенциалов, то есть изменение потенциальной энергии. Присутствие константы $$C$$ объясняется тем, что производные в (22) берутся не по физическому времени $$t_\text{физ}$$, а по другому параметру $$t$$, который в $$C$$ раз меньше: $$t_\text{физ}=Ct$$. Если бы связь $$t_\text{физ}=Ct$$ нарушилась, то (22) противоречило бы закону сохранения энергии. Таким образом, (22) можно получить без применения лагранжева формализма, просто напрямую из закона сохранения энергии с помощью замены $$t_\text{физ}=Ct$$. Следовательно, (22) не может иметь большего физического содержания, чем закон сохранения энергии, и не несет информацию о траектории, минимизирующей время.
-
(24) и (25) формально являются решением (22), так как зануляют его при выполнении (26). Но они не являются единственным решением. Фактически, любое физически возможное движение
из-за сохранения энергии будет удовлетворять уравнению (22). Важно лишь выбрать параметризацию этого движения так, чтобы физическое время было пропорционально параметру. Возьмем для примера движение по хорде $$x(t)=A$$, $$y(t)=B\cos t$$, где $$\inline A^2+B^2=R^2$$, подставим в (22) и при должном выборе константы $$C$$ (то есть при выборе правильного движения во времени вдоль хорды) получим тождество:
$$RB^2\sin^2 t=gC^2(R^2-A^2-B^2\cos^2 t)=gC^2B^2\sin^2 t.$$
Таким образом, осцилляторное движение по тоннелю в виде прямой хорды также является решением (22). Но оно отнюдь не минимизирует функционал (19) для общего времени движения между двумя точками.
Я так и не смог понять, можно ли провести рассуждения в декартовых координатах с избыточной степенью свободы и получить правильный ответ. Понятно желание использовать декартовы координаты, а не полярные, так как в них уравнение гипоциклоиды выглядит проще. Но интуитивно кажется, что лишняя степень свободы, появившаяся в функционале времени и соответствующая выбору закона движения тела вдоль траектории, не дает при применении лагранжева формализма достаточных ограничений на траекторию.
Я оставил комментарий в блоге Аманды с вопросами. Но никакой реакции не последовало.
{kind=link}
Напишите свой комментарий, если видите ошибку в моих рассуждениях, или если знаете, как сделать корректное рассмотрение в декартовых координатах.
Добавлено 13.10.2023: я нашел у себя в архиве файлов сохраненную в 2008 году статью о брахистохроне, и это не работа Аманды. Автор не указан, статья располагалась по этой ссылке. Ход решения в этих статьях одинаков, но видно, что написаны они
Хоккейная задача — 2
Продолжим решать «хоккейную задачу». В прошлом посте мы рассмотрели вариант задачи с искусственной поддержкой постоянной скорости вращения кольца. Перейдем теперь к варианту, когда за счет трения замедляется не только поступательное движение, но и вращение.
Напомним, что динамика кольца описывается уравнениями
$$\begin{align*} {du\over dt}&=-\int\limits_0^{2\pi}{d\alpha\over 2\pi}\,{u-v\sin\alpha\over\sqrt{u^2+v^2-2uv\sin\alpha}},\\ {dv\over dt}&=-\int\limits_0^{2\pi}{d\alpha\over 2\pi}\,{v-u\sin\alpha\over\sqrt{u^2+v^2-2uv\sin\alpha}}, \end{align*}$$(1)
где $$v$$ — скорость поступательного движения, $$u=\omega R$$ — скорость вращательного движения кольца.
Система уравнений (1) симметрична относительно замены $$u$$ на $$v$$. Если в начальный момент $$u=v$$, то по соображениям симметрии это соотношение будет сохраняться между скоростями вплоть до остановки. Другой случай, который мы рассмотрим — это $$u>v$$. Противоположный случай $$u<v$$ будет вытекать из него простой заменой $$u$$ на $$v$$ из тех же соображений симметрии.
Вырожденный случай u = v
Оба уравнения системы принимают один и тот же вид
$${dv\over dt}=-\int\limits_0^{2\pi}{d\alpha\over 2\pi\sqrt2}\,\sqrt{1-\sin\alpha}={2\over\pi}.$$
Скорости совместного движения падают линейно со временем, но в $$\pi/2=1,\!57$$ раз медленнее отдельного вращения или отдельного поступательного движения.
Случай u > v
К сожалению, интегралы в системе (1) сводятся к эллиптическим, что не оставляет надежды решить систему аналитически. Остается численное решение.
Прямая попытка решить уравнение в Maple проваливается. Определенные интегралы заменяются нагромождением эллиптических интегралов, приводить которое здесь нет смысла. При построении графика мы видим сообщение об ошибке
Warning, cannot evaluate the solution past the initial point, problem may be complex, initially singular or improperly set up
Чтобы упростить выражения, накладываем ограничение $$u(t)\ge v(t)\ge 0$$ на каждый из интегралов.
sys_ode := {
diff(u(t), t) = -`assuming`(
[int(
(u(t)-v(t)*sin(alpha))/sqrt(u(t)*u(t)+v(t)*v(t)-2*u(t)*v(t)*sin(alpha)),
alpha = 0 .. 2*Pi
)],
[u(t) >= v(t) and v(t) >= 0, u(t) >= 0]
)/(2*Pi),
diff(v(t), t) = -`assuming`(
[int(
(v(t)-u(t)*sin(alpha))/sqrt(u(t)*u(t)+v(t)*v(t)-2*u(t)*v(t)*sin(alpha)),
alpha = 0 .. 2*Pi
)],
[u(t) >= v(t) and v(t) >= 0, u(t) >= 0]
)/(2*Pi), u(0) = 10, v(0) = 1
};Ограничения устраняют сообщение об ошибке. Maple надолго задумывается, но выводит пустой график. Чтобы понять причину, выведем решение уравнения в
p := dsolve(sys_ode, type = numeric):
p(1);$$[t=1.,\\u(t)=10.9976102709142-2.84005015829721 10^{-8}{\rm I},\\v(t)=1.04887416587408+2.92542849266058 10^{-8}{\rm I}]$$
Накопление ошибки округления приводит к появлению ненулевой мнимой части в искомых функциях,
sys_ode := {
diff(u(t), t) = -Re(`assuming`(
[int(
(u(t)-v(t)*sin(alpha))/sqrt(u(t)*u(t)+v(t)*v(t)-2*u(t)*v(t)*sin(alpha)),
alpha = 0 .. 2*Pi
)],
[u(t) >= v(t) and v(t) >= 0, u(t) >= 0]
))/(2*Pi),
diff(v(t), t) = -Re(`assuming`(
[Re(int(
(v(t)-u(t)*sin(alpha))/sqrt(u(t)*u(t)+v(t)*v(t)-2*u(t)*v(t)*sin(alpha)),
alpha = 0 .. 2*Pi
)],
[u(t) >= v(t) and v(t) >= 0, u(t) >= 0]
))/(2*Pi), u(0) = 10, v(0) = 1
};Наконец, Maple, долго думая, всё же рисует график.
plots[odeplot](p, [
[t, (10-t), color=gray],
[t, sqrt(1-(1/10)*t), color=gray],
[t, u(t), color = blue],
[t, v(t), color = red]
], 0 .. 11);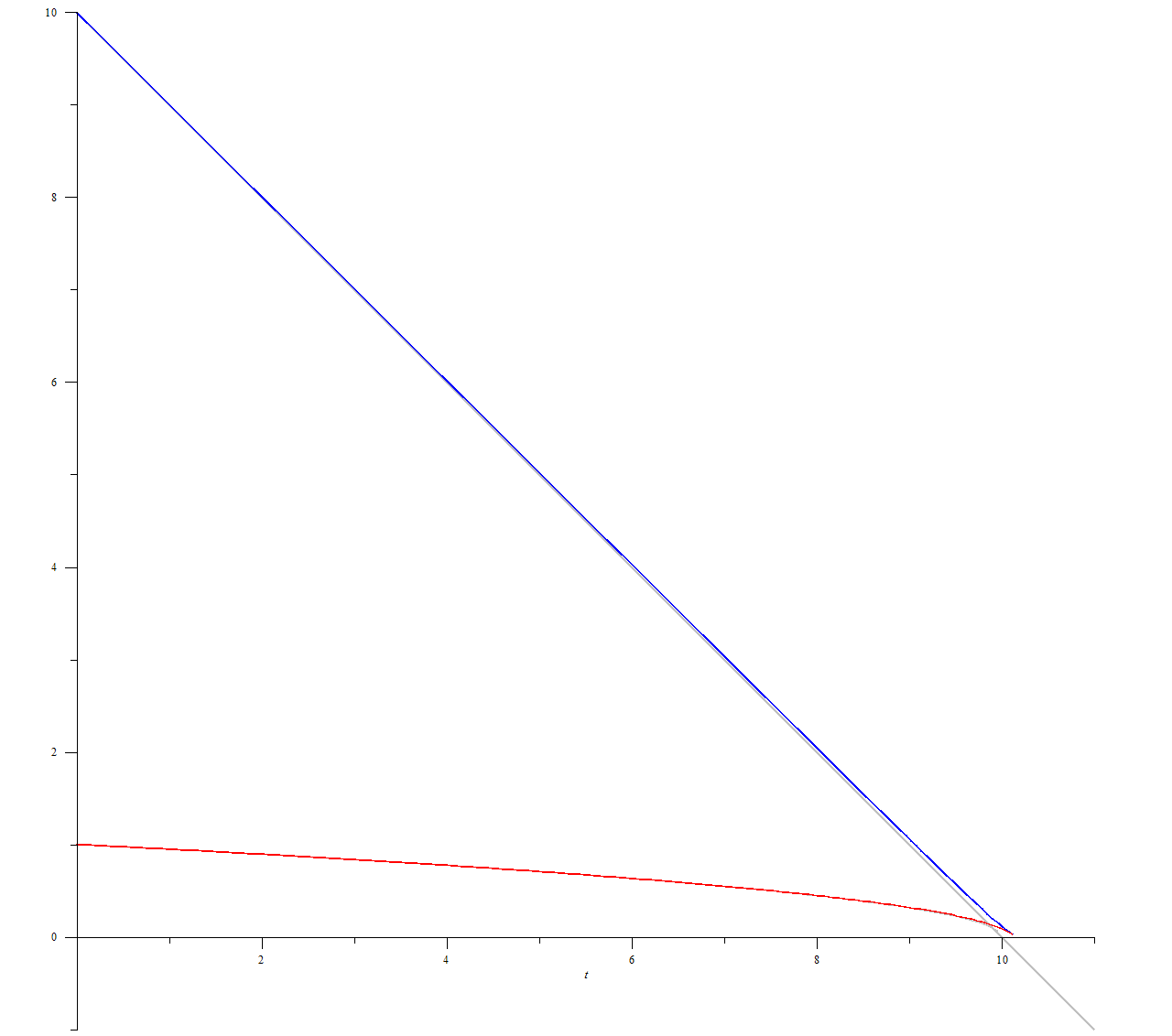
При этом мы видим предупреждение о точке остановки вычислений, которая, очевидно, совпадает с моментом окончания движения:
Warning, cannot evaluate the solution further right of 10.155665, probably a singularity
Для численного решения мы выбрали начальную поступательную скорость 1 и скорость вращения 10. Без вращения кольцо перемещается в течение 1 единицы времени на расстояние 0,5. Наличие вращения привело к тому, что поступательное движение сохранялось более 10 единиц времени.
Линеаризованное решение при u >> v
График $$u(t)$$ — синяя линия — практически совпадает с прямой. График $$v(t)$$ — красная линия — напоминает параболу. Такое поведение предсказывается линеаризованным решением в пределе $$u\gg v$$. Пренебрегая $$v$$ в первом уравнении системы (1) и раскладывая второе по степеням $$p=v/u$$, получаем
$$\begin{align*} {du\over dt}&=-1,\\ {dv\over dt}&=-{v\over 2u}. \end{align*}$$(2)
Решением этой системы являются функции $$u(t)=u_0-t$$, $$v(t)=v_0\sqrt{1-t/u_0}$$. Их графики изображены серыми линиями.
Как видим из численного решения и графика, приближение верно описывает характер движения, пока $$u$$ и $$v$$ не становятся сравнимыми. Вот график для случая, когда одна скорость в два раза больше другой:
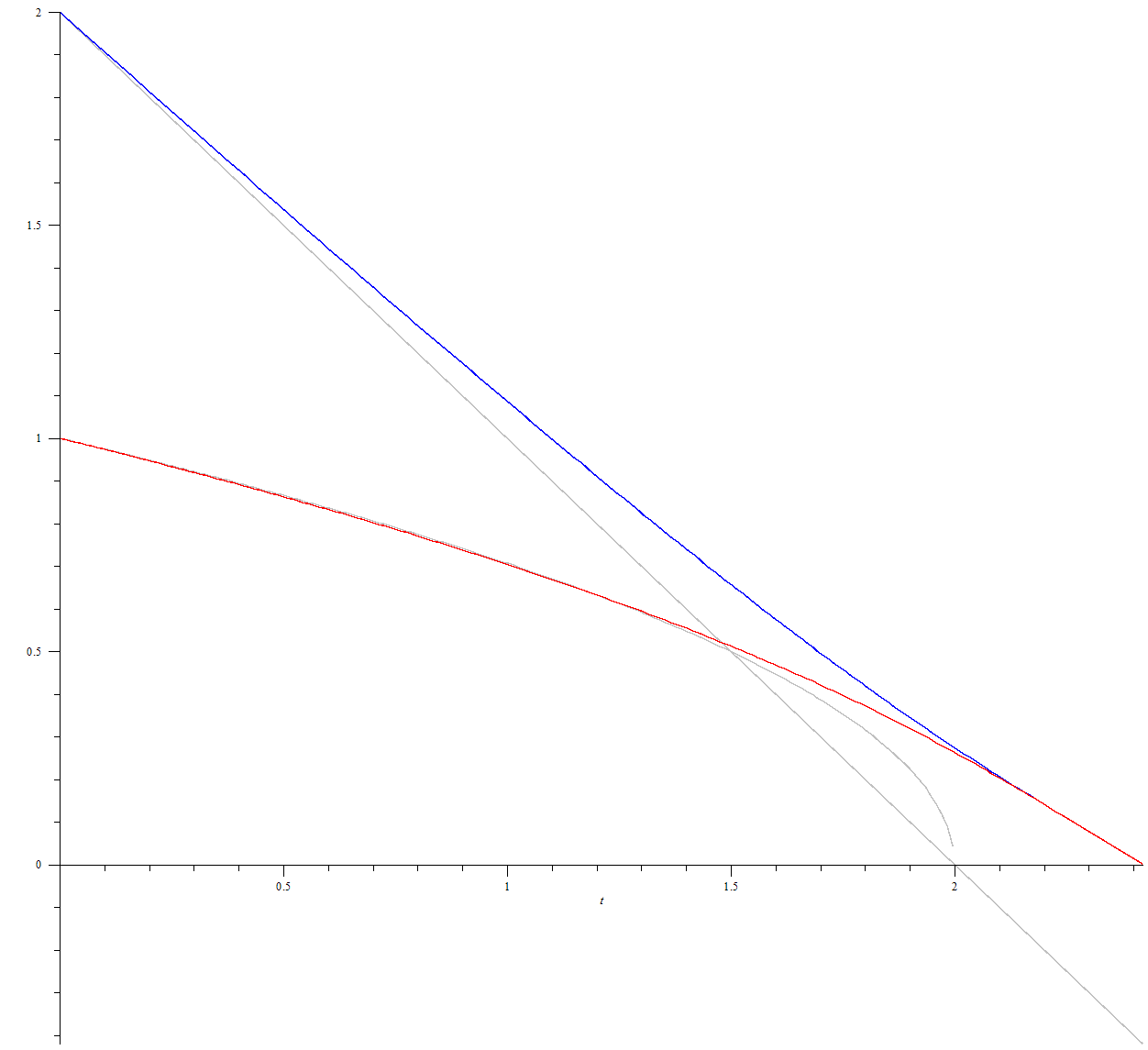
Здесь отличие от линеаризованного решения заметно практически сразу.
Путь до остановки: линеаризованное приближение
Пройденный кольцом путь дается площадью криволинейной трапеции под красной линией. В линеаризованном приближении криволинейная трапеция ограничена параболой и, как легко видеть, имеет площадь $$l=2u_0v_0/3$$. Если бы кольцо не вращалось, оно прошло бы расстояние $$l_0=v_0^2/2$$. Таким образом, чтобы увеличить проходимый путь в 5 раз, нужно закрутить кольцо с угловой скоростью
$$\omega_0={u_0\over R}={15\over 4}{v_0\over R}.$$
Напомним, что для прохождения кольцом того же пути при постоянном поддержании вращения его скорость должна быть в три раза меньше: $$\omega_0=(5/4)\,{v_0/R}$$.
Путь до остановки: численное решение
Теперь вычислим проходимый путь из первоначальных уравнений, без линеаризации.
Maple
dsol2p := dsolve(sys_ode, type = numeric, output = listprocedure):
v := eval(v(t), dsol2p):
v(4.04);$$0.00664275658541608$$
v(4.05);$$0.000276558860981139$$
v(4.06);$$0.00946581059191108$$
int(v(t), t = 0 .. 4.05);$$2.5535588257745343$$
Последний результат Maple вычислял больше 10 минут. Как видим, для начального значения 15/4 погрешность линеаризованного приближения составляет 2%.
Вывод
Мы решили «хоккейную задачу» в исходной упрощенной формулировке и без упрощений в линеаризованном приближении. С помощью системы компьютерной алгебры Maple убедились, что для условия этой задачи линеаризованное приближение дает ошибку на несколько процентов.
Хоккейная задача
В 2007 году на физтеховской олимпиаде по физике была такая задача:
Тонкое кольцо лежит на шероховатой горизонтальной поверхности. После толчка в направлении центра кольца оно перемещается на некоторое расстояние. Когда это кольцо раскрутили до некоторой угловой скорости (поддерживаемой постоянной за всё время движения), то при той же начальной скорости кольцо прошло в $$k$$ раз большее расстояние. Как было раскручено это кольцо? (попытайтесь в ответе найти нелинейную поправку). (В.С. Булыгин)
На примере этой задачи я хочу показать, как использовать системы компьютерной алгебры, в частности, Maple.
В условии поддержка постоянной угловой скорости вращения выглядит искусственно. Это требование упрощает задачу, чтобы ее можно было решить на олимпиаде. В этом посте рассмотрим такую формулировку, а в следующем — потерю через трение не только поступательной скорости, но и вращательной.
Физическая сторона задачи
Решение задачи разобрано на Элементах (там ее назвали «хоккейной задачей»). Физическая часть решения не требует выхода за рамки школьных знаний, на ней останавливаться не будем. А вот на математике остановимся подробнее. Начнем с системы уравнений, выведенной по ссылке выше:
$$\begin{align*} {du\over dt}&=-\mu g\int\limits_0^{2\pi}{d\alpha\over 2\pi}\,{u-v\sin\alpha\over\sqrt{u^2+v^2-2uv\sin\alpha}},\\ {dv\over dt}&=-\mu g\int\limits_0^{2\pi}{d\alpha\over 2\pi}\,{v-u\sin\alpha\over\sqrt{u^2+v^2-2uv\sin\alpha}}. \end{align*}$$(1)
Здесь $$v$$ — скорость поступательного движения, $$u=\omega R$$ — скорость вращательного движения кольца.
Уравнения таковы, что соответствующим выбором единицы измерения времени мы можем избавиться от несущественного множителя $$\mu g$$, поэтому в рассуждениях ниже мы его опустим.
Предельный режим
В предположении $$u=const$$ уравнение на $$v$$ имеет простой предельный режим, когда $$v\to 0$$. Тогда раскладывая подынтегральное выражение в ряд по $$v$$ с точностью до второго порядка малости и интегрируя, видим, что убывание скорости пропорционально самой скорости. При малых скоростях кольцо останавливается по экспоненте, как будто трение не сухое, а жидкостное.
Случай постоянной скорости вращения
По условию угловая скорость вращения поддерживается постоянной, а линейная скорость падает до 0. Логично предположить, что мы имеем дело с режимом $$0<v<u=\text{const}$$. Пусть $$p=v/u$$. Тогда
$$u{dp\over dt}&=-\int\limits_0^{2\pi}{d\alpha\over 2\pi}\,{p-\sin\alpha\over\sqrt{1+p^2-2p\sin\alpha}}.$$(2)
До остановки кольцо проходит расстояние
$$l=\int\limits_0^{t_\text{ост}} v\,dt=u\int\limits_0^{t_\text{ост}} p\,dt.$$(3)
Подставим $$dt$$ из (2) в (3):
$$u^2\int\limits_{p_0}^0{p\,dp\over-\int\limits_0^{2\pi}{d\alpha\over 2\pi}\,{p-\sin\alpha\over\sqrt{1+p^2-2p\sin\alpha}}}=u\int\limits_0^{t_\text{ост}} p\,dt=l.$$(4)
Когда вращения нет, кольцо движется равнозамедленно и проходит расстояние $$l_0=v_0^2/2$$. Вращающееся кольцо проходит в $$k=5$$ раз большее расстояние $$l$$:
$$l=kl_0=k\,{v_0^2\over 2}=ku^2\,{p_0^2\over 2}.$$
Подставим $$l$$ в (4) и поделим на $$p_0^2$$:
$${1\over p_0^2}\int\limits^{p_0}_0{p\,dp\over\int\limits_0^{2\pi}{d\alpha\over 2\pi}\,{p-\sin\alpha\over\sqrt{1+p^2-2p\sin\alpha}}}={k\over 2}.$$(5)
Это уравнение дает нам соотношение между начальной скоростью вращения кольца $$\omega_0=v_0/(p_0R)$$ и ростом проходимого до остановки расстояния $$k$$.
Численное решение в Maple
Внутренний интеграл выражается через эллиптические интегралы. Однако Maple ничего не знает про знак $$p$$ и выдает слишком громоздкое выражение, содержащее фрагменты вроде $$\sqrt{-{2p/(p-1)^2}}$$, csgn(p-1). Подскажем очевидное ограничение на $$p$$:
`assuming`([
int(
(p-sin(alpha))/(2*Pi*sqrt(p^2 + 1 - 2*p*sin(alpha))),
alpha = 0 .. 2*Pi
)
], [p > 0]):
factor(%);
$${\left(p-1\right)\mathrm{EllipticK}\left(\dfrac{2\sqrt{p}}{p+1}\right)+\left(p+1\right)\mathrm{EllipticE}\left(\dfrac{2\sqrt{p}}{p+1}\right)\over p\pi}$$
После этого легко подобрать ответ $$p_0$$ с нужной точностью:
p0 := 0.78:
(int(
p^2 * Pi / (
(p-1) * EllipticK(2*sqrt(p)/(p+1)) +
(p+1) * EllipticE(2*sqrt(p)/(p+1))
),
p = 0 .. p0
)) / p0^2;
$$2.491446599$$
В начальный момент скорости поступательного движения и вращения были связаны соотношением $$v_0\approx0,\!78\,\omega_0R$$.
Приближенный ответ можно получить не только численно, но и из разложения внутреннего интеграла в ряд
expand(series(`assuming`([int(...)], [p >= 0]), p = 0, 8));
$${1\over 2}p+{1\over 16}p^3+{3\over 128}p^5+O(p^7)$$
Вычислим левую часть (5) при $$p_0=0,\!78$$, последовательно уточняя разложение внутреннего интеграла:
$$\begin{align*} &{1\over 0,\!78^2}\int\limits_0^{0,78}{p\over{\frac{1}{2}p}}\,dp=2,\!564102564,\\ &{1\over 0,\!78^2}\int\limits_0^{0,78}{p\over{\frac{1}{2}p+{1\over 16}p^3}}\,dp=2,\!501916372,\\ &{1\over 0,\!78^2}\int\limits_0^{0,78}{p\over{\frac{1}{2}p+{1\over 16}p^3+{3\over 128}p^5}}\,dp=2,\!493976851. \end{align*}$$
Хотя начальное значение параметра $$p_0=v_0/u_0=0,\!78$$ нельзя назвать малым, линеаризация по этому параметру дает погрешность менее 3%. Для линейного приближения ответ составил бы $$p_0=4/k=0,\!8\,$$. А учет кубической поправки уже дает погрешность меньше процента.